企业免费推广平台

蓝鲸智能机器人(深圳)有限公司通用机器人无轨导航系统|机器人SLAM导航方案|ROS自动充电模块|无轨AGV/AMR
159****0092
当前ROS是只支持Python2.7的。Python3的支持在ROS的计划中,详细的可以看这里。简单说来就是要到2020年ROS的N版本才能完全支持Python3。首先要了解为什么ROS不能支持Python3.对于纯的Python代码同时支持Python3和Python2.7是比较容易的,基本上ROS的代码也都是支持的。问题在于包含了C++或者C的那部分Python代码。Python2.7和Python3的cmodule代码相差很大。一次只能编译其中的一种版本。而且很多module没有做好Python3的支持。在Python3环境下也无法编译。这就是ROS无法支持Python3的原因。目前ROS的**包都是支持用Python3从源码编译的。但是官方并没有发布Python3的软件包,安徽配送机器人。所以想要使用的话要自己编译,安徽配送机器人,安徽配送机器人。蓝鲸智能机器人论坛介绍两种使用Python3的方法,具体可以登陆蓝鲸智能官方论坛查看。基于普通摄像头的DS_SLAM算法进行3维建模。安徽配送机器人
实时显示机器人当前姿态是一件很酷的事情,在ROS中借助rviz可以轻松实现这个目标。先用solidworks 建立小车模型,并下载安装好solidwork转udrf插件。打开udrf插件。两个轮子底盘整个模型需要3个link,3个joint.首先编辑base_link,留意上文中全局坐标系。左右轮设置后开始导出。现在我们已经获到了机器人的udrf文件,生成的整个文件夹是一个ROS包, 修改launch文件夹内的display.launch文件 ,false改true。将这个ros包复制到ROS工作空间中,catkin_make编译后就可以用本文开头的方法测试使用了。重庆激光雷达机器人AMR单目视觉导航早已投入工业应用。

蓝鲸机器人的上位机和机器人的交互原理如下。首先蓝鲸机器人公司的移动平台上会开启一个udp广播服务端。向局域网发送广播数据。广播数据包含蓝鲸机器人公司的移动平台的主机信息,如ip,mac,端口,id。客户端会等待广播数据。当Windows客户端收到广播数据之后向蓝鲸机器人公司的移动平台上的udp服务器发送数据,表明自己的存在。之后蓝鲸机器人公司的移动平台程序会根据收到的相关信息和Windows客户端建立连接。在局域网内同时有多个蓝鲸机器人公司的移动平台主机和多个客户端的时候。按照之前说明,每个蓝鲸机器人公司的移动平台主机都会广播出自己相关信息。客户端会根据收到的udp广播信息维护一份当前局域网蓝鲸机器人公司的移动平台主机的列表。当客户端点击连接按钮后会弹出一个下拉菜单选择需要连接的蓝鲸机器人公司的移动平台主机。在发现过程完成之后,客户端和服务器都有了对方的信息。Windows客户端会建立一个udp服务器,然后蓝鲸机器人公司的移动平台通过udp连接把状态信息发送至Windows客户端。Windows客户端显示对应的状态。关于地图载入部分、地图绘制、控制部分等原理,可以登录蓝鲸智能机器人(深圳)有限公司官方网站,找到论坛入口进行交流。
在训练机器学习模型时,通常需要将数据表示为固定大小的向量。由于事先不知道图像中的对象数量,因此我们不知道正确的输出数量。因此,需要进行一些后处理,这增加了模型的复杂性。历史上,使用基于滑动窗口的方法来处理可变数量的输出。通过为所有不同位置生成该窗口的固定大小的特征。获得所有预测后,一些被丢弃,一些被合并以获得较终结果。在训练机器学习模型时,通常需要将数据表示为固定大小的向量。由于事先不知道图像中的对象数量,因此我们不知道正确的输出数量。因此,需要进行一些后处理,这增加了模型的复杂性。历史上,使用基于滑动窗口的方法来处理可变数量的输出。通过为所有不同位置生成该窗口的固定大小的特征。获得所有预测后,一些被丢弃,一些被合并以获得较终结果。我们正在研究给机器人装上“眼睛",使它具有人工智能,会“学习”和适应环境的变化。

使用蓝鲸智能机器人的ROS镜像,我们可以实现通过ps4手柄控制自己小车的功能,更加的方便也更具有可玩性。先要安装对应的ros驱动同时将手柄与ubuntu进行蓝牙配对。启动ds4_driver和turtlebot_teleop_joy。就可以使用了,还可以通过手柄设置关机按键,具体操作可以登录蓝鲸智能的论坛详细了解。使用蓝鲸智能机器人的ROS镜像,我们可以实现通过ps4手柄控制自己小车的功能,更加的方便也更具有可玩性。先要安装对应的ros驱动同时将手柄与ubuntu进行蓝牙配对。启动ds4_driver和turtlebot_teleop_joy。就可以使用了,还可以通过手柄设置关机按键,具体操作可以登录蓝鲸智能的论坛详细了解。并联机器人:无需减速器,成本比较低;所有的驱动功率相同、易于产品化;逆解简单,易于实时控制。天津机器人巡逻安防
蓝鲸通用AGV底盘实现多领域应用拓展。安徽配送机器人
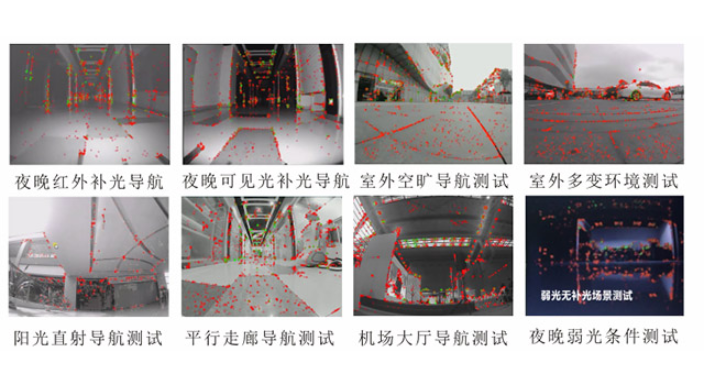
单目视觉slam算法分成两种,一种是基于特征点,另一种是不用特征点的直接法。特征点法通过相邻图像帧的特征点匹配和三角定位来确定特征点的三维坐标,然后利用这些已经确定三维坐标的特征点来确定摄像头的运动和姿态。直接法则利用相邻图像强度变化信息,来直接计算摄像头姿态和图像像素的深度信息。特征点法的优势是,特征点的提取和匹配比较稳定,不容易受光照变化的影响,同时特征点还能用于闭环检测,闭环检测可以消除累计误差,极大地提高建图定位精度。因为要进行特征点的提取和匹配,特征点方法的运算量比较大。直接法的优势是,相比特征点方法只计算特征点的三维信息,它可以计算图像中绝大部分像素的深度信息,从而建立稠密的三维地图,稠密的三维地图能很方便的运用于后续的机器人导航避障。但是直接法容易受光照强度变化的影响,同时缺乏可靠、稳定的闭环检测方法,大场景的建图误差会更大。安徽配送机器人
蓝鲸智能机器人(深圳)有限公司发展规模团队不断壮大,现有一支专业技术团队,各种专业设备齐全。专业的团队大多数员工都有多年工作经验,熟悉行业专业知识技能,致力于发展蓝鲸智能,BWBOT,伽利略机器人导航,拉格朗日机器人调度,赤兔无轨AGV的品牌。公司坚持以客户为中心、机器人的技术开发、技术服务;机器人导航系统研发、生产、销售;机器人配套智能模块销售;自动充电;自主导航;机器人调度等技术开发定制、销售;移动机器人平台开发、定制、生产、销售;无轨AGV,无轨AMR开发、定制、生产、销售;市场为导向,重信誉,保质量,想客户之所想,急用户之所急,全力以赴满足客户的一切需要。诚实、守信是对企业的经营要求,也是我们做人的基本准则。公司致力于打造高品质的通用机器人无轨导航系统,机器人SLAM导航方案,ROS自动充电模块,无轨AGV/AMR。
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
蓝鲸智能机器人(深圳)有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.